Table of Contents
Introduction:
This is a new era of Artificial Intelligence [AI]. Artificial intelligence has given birth to robotics. As there is a huge scope for robotics, we find these robots in each field. Due to the growing popularity and also due to the research in the field of robotics, the days are very near wherein robots will replace all human activities.
One of the major challenges for efficient programming of complex robot tasks is to achieve, in the context of human-robot interaction, programming by demonstration (PbD) capabilities. The aim of robot PbD is to simplify the problem of describing robot actions. Traditional robotic applications require complex interfaces that are unsuitable for standard desktop environments and untrained users. PbD offers a way to build user-friendly interfaces that overcome several programming difficulties. For manipulation tasks, a PbD system provides the user with a conceptually simple way to instruct a robotic platform just by showing with his/her own hands how to do a particular task. PbD systems can be classified into two main categories depending
on the way the demonstration is carried out. The most general way is performing the demonstration in a real environment. This approach requires difficult task recognition and segmentation capabilities. Another approach involves performing the demonstration in a simulated environment where tracking the user’s actions is easier. A major difficulty of this approach is that in cluttered virtual environments, such as for robotic assemblies, it requires that fine manipulation tasks can be tracked with high fidelity.
In PbD in simulated environments, human-robot interaction is essentially mediated by the virtual environment. It involves user-interface design, human factors, performance evaluation, and cognitive psychology. Most traditional human-computer interaction systems focus on the design of applications that convey to the user only graphical information through a visual channel. To enhance the perception of advanced data sets such as a virtual environment, a graphical interface can be augmented with additional sensory aids such as auditory and haptic feedback
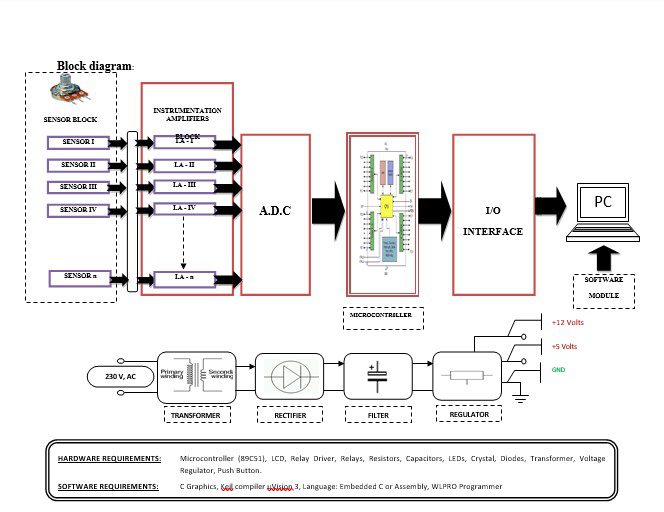
Block diagram explanation:
Power supply unit
This section needs two voltages viz., +12 V & +5 V, as working voltages. Hence specially designed power supply is constructed to get regulated power supplies.
Potentiometer:
A potentiometer informally a pot, is a three-terminal resistor with a sliding or rotating contact that forms an adjustable voltage divider.[1] If only two terminals are used, one end and the wiper, it acts as a variable resistor or rheostat.
A potentiometer measuring instrument is essentially a voltage divider used for measuring electric potential (voltage); the component is an implementation of the same principle, hence its name
Instrumentation amplifier:
An instrumentation (or instrumentational) amplifier is a type of differential amplifier that has been outfitted with input buffer amplifiers, which eliminate the need for input impedance matching and thus make the amplifier particularly suitable for use in measurement and test equipment. Additional characteristics include very low DC offset, low drift, low noise, very high open-loop gain, very high common-mode rejection ratio, and very high input impedance. Instrumentation amplifiers are used where great accuracy and stability of the circuit both short and long-term are required.
Analog-to-digital converter
An analog-to-digital converter (ADC, A/D, or A to D) is a device that converts a continuous physical quantity (usually voltage) to a digital number that represents the quantity’s amplitude. The conversion involves quantization of the input, so it necessarily introduces a small amount of error. Instead of doing a single conversion, an ADC often performs the conversions (“samples” the input) periodically. The result is a sequence of digital values that have been converted from a continuous-time and continuous-amplitude analog signal to a discrete-time and discrete-amplitude digital signal.
Microcontroller:
The Atmel AT89 series is an Intel 8051-compatible family of 8-bit microcontrollers (µCs) manufactured by the Atmel Corporation. Based on the Intel 8051 core, the AT89 series remains very popular as general-purpose microcontrollers, due to their industry standard instruction set, and low unit cost. This allows a great amount of legacy code to be reused without modification in new applications. While considerably less powerful than the newer AT90 series of AVR RISC microcontrollers, new product development has continued with the AT89 series for the aforementioned advantages.
Methodology:
This project is an effort to simulate a robot, which converts real-time actions into digital signals which in turn are used to produce virtual actions. The software for this project acts as an interface between the hardware devices and the controller computer. Inputs to the system are taken from sensors that are fitted on the intended part or body. These sensors supply the real-time conditions of the intended body to the computer. The software processes those signals and according to the received signal levels, it moves the graphical picture on the monitor. That means the virtual movement is created by the software part, whereas real actions are captured by an array of sensors. This interaction makes this project “Virtual Reality Demonstration” very novel and advanced. This project gives an idea of the working of a simple robot and demonstrates the use, implementation, and applications of Virtual Reality and Technology.
Here the project is designed using the C and C graphics. This project is connected to the external hardware; the simulator accepts the commands from the hardware and accordingly performs the desired task. This project finds various applications in the field of Tele-Medicine and Tele-Robotics. Here the project can also be connected with hardware.
Advantages:
- The VR system described here provides an intuitive, interactive simulation interface that can be used for control and training on complex robotic systems
- The development of a user-friendly multimodal interface for PbD exploiting advanced graphical, haptic, and communication software libraries;
- The proposal of a one-shot learning strategy for acquiring manipulation tasks in virtual reality for both fixed-base robot manipulators and mobile manipulators;
- The development of a reusable library for different robotics components (robot arms, mobile robots, and robot hands);
- The proposal of an algorithm for trajectory reconstruction and stochastic approximation of the operator’s motions;
- The investigation of the grasp recognition problem in virtual reality and the realization of a grasp trajectory planner based on human demonstration;
- The evaluation of the benefits provided by the use of virtual fixtures for user assistance.
Disadvantages:
- One-time investment cost.
Applications:
- Computer Science and Finance
- medical diagnosis
- stock trading and Transportation
- robot control and law
- remote sensing, Telecommunications
- scientific discovery and toys