

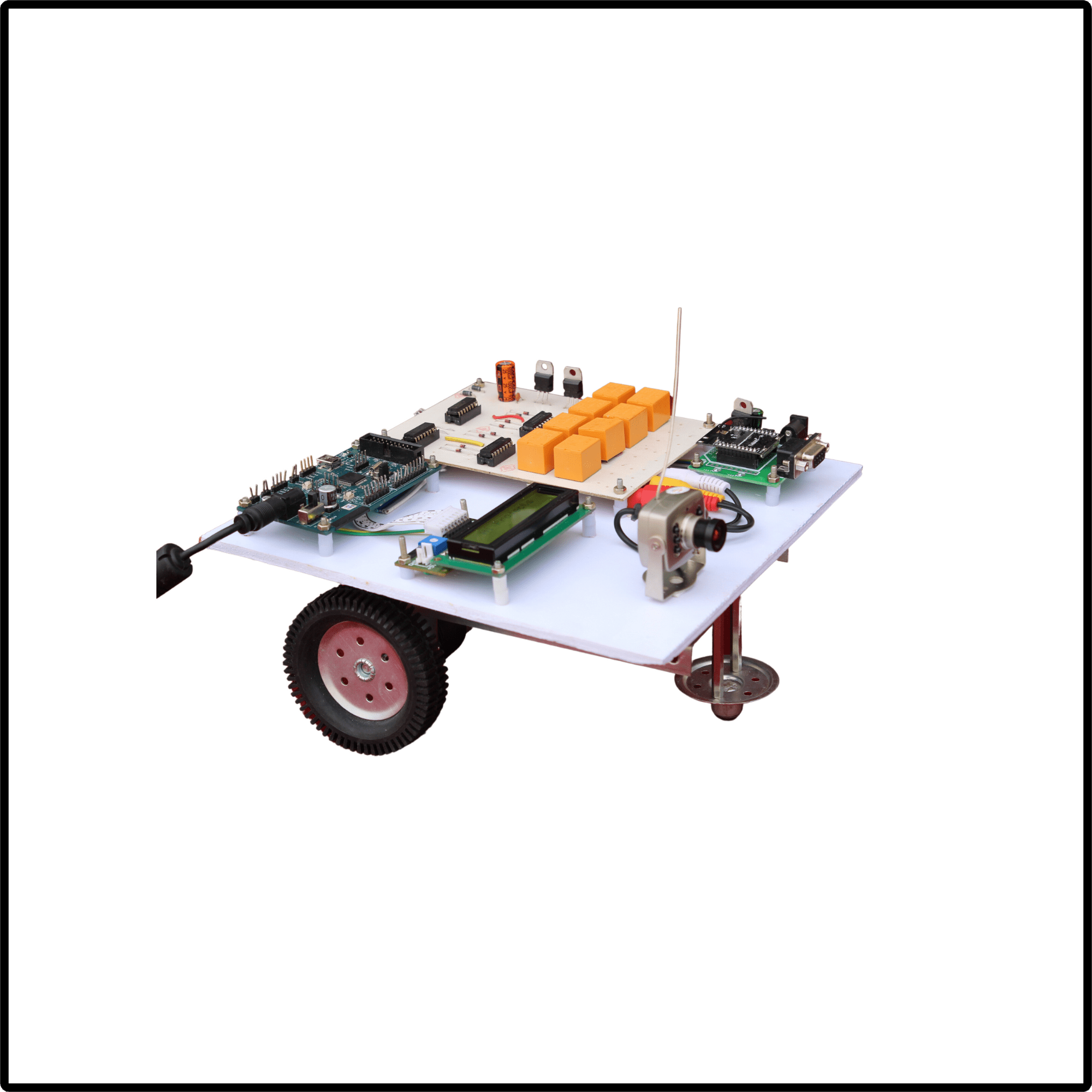
Practical and cost-effective robot navigation algorithm using Zigbee technology and fuzzy logic controller. Integration of vision-based navigation and artificial landmarks for improved robot position estimation. Incorporation of behavior-based navigation systems to handle unstructured environments. Use of Zigbee protocol and a camera for live view and night vision capabilities.
To Read More about this project-Click This

Reviews
There are no reviews yet.